

Featured
5.55% off
Description
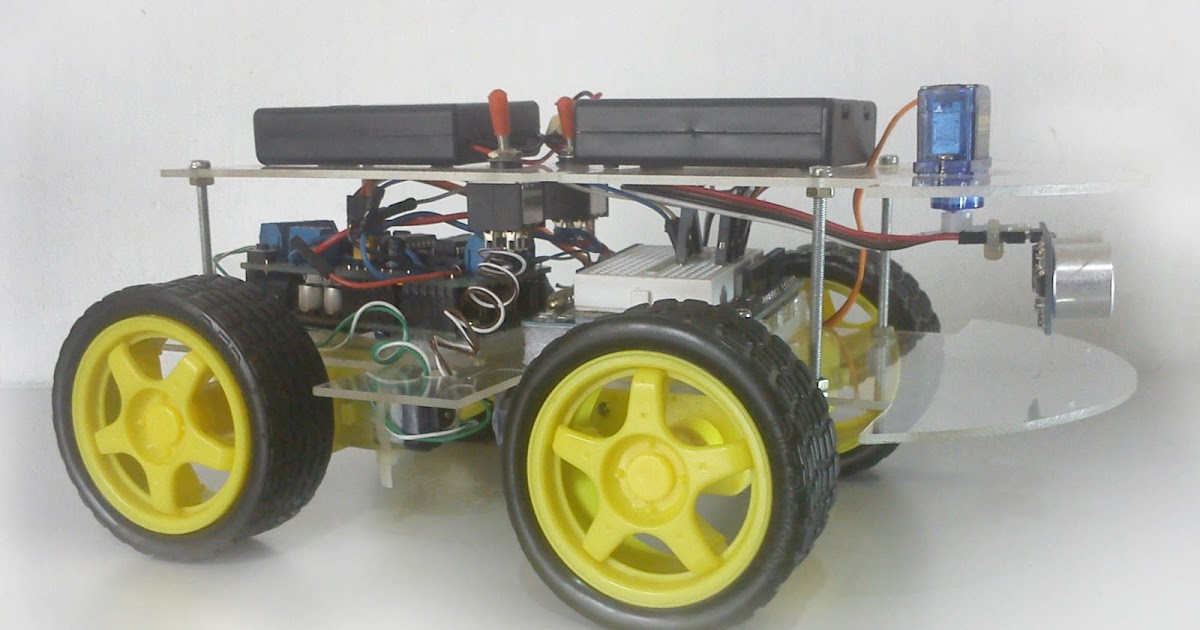
An Obstacle Avoidance Robot using Arduino and ultrasonic
sensors is a common do-it-yourself robotics project. It's designed to
autonomously navigate and avoid obstacles using ultrasonic sensors. Here's a
detailed description of the components and working principle of an Obstacle
Avoidance Robot:
Components:
- Chassis:
- The
physical structure of the robot, which includes wheels, motors, and a
platform to mount components.
- Ultrasonic
Sensors:
- Ultrasonic
sensors, like the HC-SR04 or similar modules, are used to measure the
distance to nearby objects. These sensors emit ultrasonic pulses and
measure the time it takes for the sound waves to bounce back from an
obstacle.
- Arduino
Board:
- An
Arduino board (e.g., Arduino Uno) serves as the robot's brain. It
processes data from the ultrasonic sensors and controls the robot's
movements.
- Motor
Drivers:
- Motor
driver circuits control the speed and direction of the robot's motors.
Typically, an H-bridge motor driver is used.
- Wheels
and Motors:
- The
wheels and motors enable the robot to move. The motors are controlled by
the Arduino via the motor driver.
- Power
Source:
- Batteries
or a power supply provide the necessary energy for the motors, Arduino,
and other components.
Working Principle:
- Ultrasonic
Sensing: The ultrasonic sensors emit high-frequency sound waves, and
then they listen for the echo. By measuring the time, it takes for the
echo to return, the sensors calculate the distance to nearby objects.
- Obstacle
Detection: The Arduino continuously reads the data from the ultrasonic
sensors. When an object is detected within a specified range, the robot
considers it an obstacle.
- Path
Planning: When an obstacle is detected, the Arduino determines the
best way to avoid it. This could involve stopping, reversing, turning, or
any combination of these actions.
- Motor
Control: The Arduino sends commands to the motor driver to control the
robot's movements. For example, if an obstacle is detected in front of the
robot, it may stop and turn to the left or right to avoid the obstacle.
- Real-time
Operation: The robot's control system operates in real-time, making
decisions based on the data from the ultrasonic sensors and adjusting the
robot's path as needed.
Advantages:
- Obstacle
Avoidance: The robot can autonomously navigate and avoid obstacles,
making it suitable for various applications, including surveillance and
cleaning robots.
- Simplicity:
It's a great project for beginners to learn about robotics, sensor
integration, and programming.
Limitations:
- Limited
Sensor Range: Ultrasonic sensors have a limited range, and they may
not detect very small obstacles or transparent objects.
- Sensitivity
to Acoustic Conditions: Noise and acoustic interference can affect the
accuracy of sensor readings.
In summary, an Obstacle Avoidance Robot using Arduino and
ultrasonic sensors is an educational and practical project. It's an excellent
way to explore the basics of robotics, sensor integration, and real-time
control systems while creating a robot capable of autonomously navigating and
avoiding obstacles.